
全國(guó)服務(wù)热線(xiàn)
13586780068
13586780068

联系人:謝(xiè)经理(lǐ)
電(diàn)话:13586780068
邮箱:xjc818@126.com
地址:深圳市龙岗區(qū)宝龙街(jiē)道翠龙路路12号2栋
温馨提醒:自动螺丝机、自动组装机市场质量参差不齐,看似一样,但质量千差万别,认准客户现场使用(yòng)真实案例,质量才有(yǒu)保障!
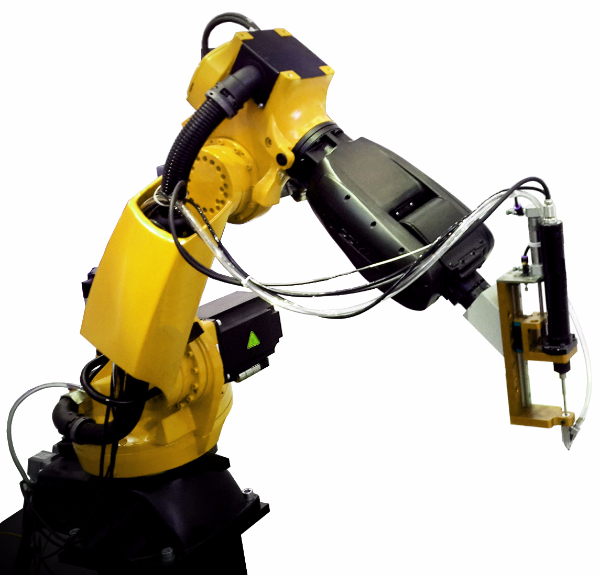
六关节机器人是工业机器人中最常见的类型,具有(yǒu)六个自由度,可(kě)以实现多(duō)种运动方式。锁螺丝是六关节机器人常见的应用(yòng)之一,可(kě)以实现螺丝的快速、精准锁紧。
虎雅科(kē)技是一家专业从事工业机器人应用(yòng)解决方案的企业,拥有(yǒu)丰富的六关节机器人锁螺丝应用(yòng)经验。本文(wén)将从专业的角度介绍六关节机器人锁螺丝的安装方法,希望对您有(yǒu)所帮助。
一、准备工作
在安装六关节机器人锁螺丝之前,需要做好以下准备工作:
二、安装步骤
六关节机器人锁螺丝的安装步骤如下:
三、控制程序编写
六关节机器人的控制程序是锁螺丝应用(yòng)的关键。控制程序需要根据工件的形状、大小(xiǎo)、重量以及螺丝的类型等因素进行编写。
控制程序的主要功能(néng)包括:
以下是一个简单的锁螺丝控制程序示例:
def lock_screw(robot, screw, position):
# 确定螺丝的起始位置
robot.move_to(position)
# 计算螺丝的运动轨迹
trajectory = robot.generate_trajectory(screw.length, screw.diameter)
# 控制六关节机器人执行螺丝锁紧操作
robot.execute_trajectory(trajectory)
if __name__ == "__main__":
# 初始化六关节机器人
robot = Robot()
# 定义螺丝
screw = Screw(length=10mm, diameter=5mm)
# 定义螺丝的起始位置
position = [0, 0, 0]
# 锁紧螺丝
lock_screw(robot, screw, position)
四、注意事项
在安装六关节机器人锁螺丝时,需要注意以下事项:
结语
六关节机器人锁螺丝是工业生产中常见的应用(yòng)。通过本文(wén)的介绍,您可(kě)以了解到六关节机器人锁螺丝的安装方法、注意事项以及控制程序编写。希望这篇文(wén)案对您有(yǒu)所帮助。
虎雅科(kē)技是一家专业从事自动化组装机、装配机、视觉检测设备及工业机器人应用(yòng)解决方案的企业,拥有(yǒu)丰富的六关节机器人锁螺丝应用(yòng)经验。如果您有(yǒu)任何疑问,请随时****。







